Professor Pieter Abbeel, Director of the Berkeley Robot Learning Lab and Co-Director of the Berkeley Artificial Intelligence (BAIR) Lab, presents the “From Inference to Action: AI Beyond Pattern Recognition” tutorial at the May 2021 Embedded Vision Summit.
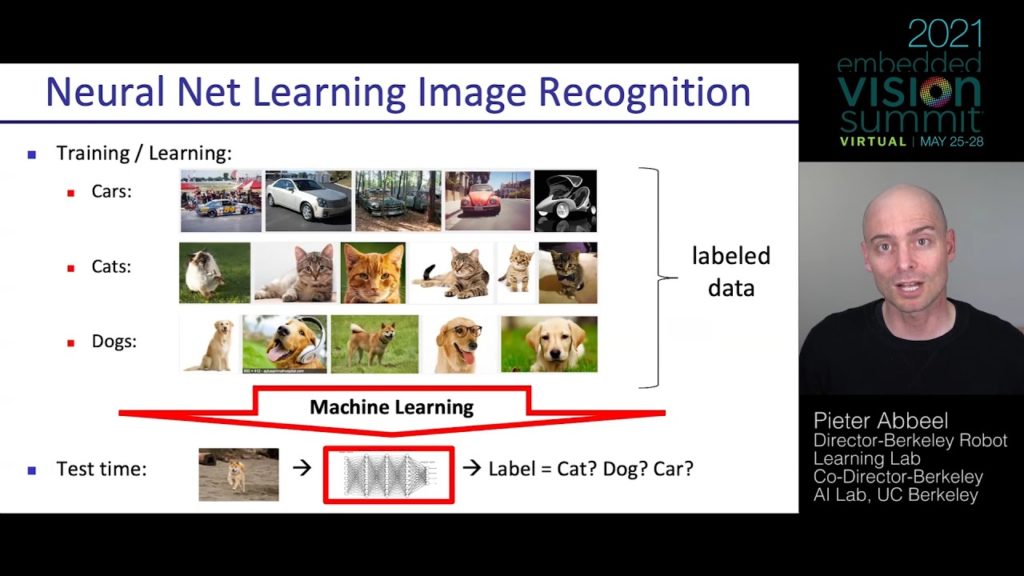
Pattern recognition—such as that used in image recognition, speech recognition and machine translation—has been the primary focus of the last decade’s progress in artificial intelligence. But intelligence fundamentally requires more than mere pattern recognition: It also requires the ability to achieve goal-oriented behaviors. Two new methods, deep reinforcement learning and deep imitation learning, provide paradigms for learning goal-oriented behaviors and have shown great promise in recent research. These approaches have demonstrated remarkable success in learning to play video games, learning to control simulated and real robots, mastering the classical game of Go and automation of character animation.
In this talk, Abbeel describes the ideas underlying these advances, and their current capabilities and limitations, with a focus on practical applications. He explores the characteristics that have unlocked important new use cases (e.g. AI robotic automation in warehouses) while others (e.g., self-driving cars) remain AI-bottlenecked. He also highlights important areas where significant breakthroughs are still needed.
See here for a PDF of the slides.