NXP Tech Days Comes to Silicon Valley
NXP Semiconductors will host “NXP Tech Days,” on August 18, 2026, from 9:00 am to 6:00 pm PDT in Santa Clara, California. The event will feature hands-on workshops, expert-led sessions, and real-world insights across embedded systems, edge AI, connectivity, and security. From the event page: The Future, Engineered During the general session, discover how NXP

Real-Time Vision-Language Inference on AMD Radeon™ iGPU Using ROCm™
This demonstration showcases a real-time vision-language inference pipeline running on an AMD Radeon™ integrated GPU, highlighting multimodal AI capabilities on power-efficient embedded platforms. The system processes live or recorded video streams and enables interactive question answering based on visual scene understanding. A lightweight Vision-Language Model (VLM) is deployed to jointly interpret visual inputs and natural

From Silicon to Scale: How DEEPX Is Scaling Developer Support
When your chip is running inside 30 partner ecosystems across 8 countries, how you manage and deliver technical knowledge becomes as critical as the silicon itself. This blog post was originally published at Rapidflare’s website. It is reprinted here with the permission of Rapidflare. DEEPX is one of the most technically credentialed companies in edge AI.

AI Agents on AMD – Secure Agent Computing at the Edge
See how agentic AI workflows can use both local AMD hardware and cloud resources to improve privacy, performance, and cost efficiency. This demo showcases AI agents running with the AMD ROCm™ software platform. Private and data-sensitive tasks can remain on the local system, while more demanding workloads can be sent to cloud-based models when needed.

In-cabin Voice Agent at the Edge: Redefining the Drive
This blog post was originally published at ENERZAi’s website. It is reprinted here with the permission of ENERZAi. Hyundai Motor Group recently introduced Gleo AI — a conversational voice AI agent — in the all-new Grandeur, marking the first time such a system has appeared in one of their production vehicles. Unlike traditional voice recognition, which only responds to fixed

Microchip Advances Neural Network Implementation with VectorBlox 3.0 Accelerator SDK
Latest release leverages sparse neural networks to improve performance and enable more efficient edge AI on PolarFire® FPGAs and SoCs CHANDLER, Ariz., July 14, 2026 — Deploying AI inference in power‑constrained and mission‑critical environments such as aerospace and defense systems requires solutions that balance performance, efficiency, reliability and ease of development. To better manage these challenges,

Beyond the Bench: The Hard Truth About Robotics Automation in Logistics with Pickle Robotics
This video was originally published by Peridio. It is reprinted here with the permission of Peridio. In this episode of Beyond the Bench from Peridio, Bill Brock sits down with Ari Eisenstein, co-founder and CTO of Pickle Robotics. They discuss the evolution of robotics and AI, focusing on Pickle’s innovative approach to logistics automation. Ari

When the Edge Is 400 Kilometers Up: AI, Space, and the Limits of Cloud Computing
This blog post was originally published at Ambarella’s website. It is reprinted here with the permission of Ambarella. The orbital community has reached the same conclusions that the broader edge AI industry has been articulating for years: If moving the data is more expensive than moving the result, the processing belongs where the data was produced. The
Pulling Back the Curtain on a Smarter, More Connected AI Future
At the 2026 Embedded Vision Summit, Boston AI CEO Peter Winston explores the latest advances shaping the future of AI. From intelligent agents to next-generation edge applications, he highlights how AI is evolving beyond task automation to become a more capable and collaborative partner within organizations. The video concludes with a look at emerging trends

Insight Mirror: The mirror that sees you. The mirror that knows you. The mirror that talks back.
At the 2026 Embedded Vision Summit, Dan Daogaru shows an interactive, AI-aware smart mirror designed to redefine customer engagement. The Insight Mirror is not just a reflection; it is a fully integrated, intelligent AI companion capable of dynamic, voice-first conversations, open-vocabulary visual recognition, and presence-aware engagement. Built around a single high-performance C++20 application and fully

HTEC White Paper Outlines the Convergence of Edge AI, Semiconductor Software, and Autonomous Systems
This content was originally published at HTEC’s website. It is reprinted here with the permission of HTEC. Physical AI at the Edge: Building the Full Stack for Real-World Deployment For years, AI progress was measured by model benchmark scores. The real test is different: does it work when deployed in a vehicle, a factory, a

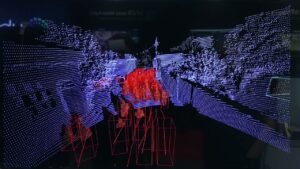
ILLIUM AI Demonstrates AI Machine Vision with LIDAR Precision
At the 2026 Embedded Vision Summit, Luis Dussan and Adrian Kaehler show their system fusing real-time camera and LIDAR data at the edge to deliver precise spatial awareness without heavy cloud dependency or large data backhaul. Using an intuitive user interface, operators can visualize environments, interact with live data, and leverage an integrated AI agent
“From Chips to Platforms: Scaling Edge AI with SoMs, Production Linux and Secure Life-Cycle Ops,” a Presentation from Peridio
Amir Sherman, Head of Global Business Development at Peridio presents “From Chips to Platforms: Scaling Edge AI with SoMs, Production Linux and Secure Life-Cycle Ops” at the May 2026 Embedded Vision Summit. Edge AI has moved beyond choosing a single chip or platform. Teams now face a harder question: how… “From Chips to Platforms: Scaling
“Porting and Optimizing Advanced Vision-Language-Action Models for Embedded Autonomous Systems,” a Presentation from Quadric
Mike Leonard, Software Architect at Quadric presents “Porting and Optimizing Advanced Vision-Language-Action Models for Embedded Autonomous Systems” at the May 2026 Embedded Vision Summit. World-scale vision-language-action (VLA) models are the new frontier in AI for autonomous driving and robotics, enabling systems to perceive, reason and act in complex real-world environments.… “Porting and Optimizing Advanced Vision-Language-Action

Powering Edge AI at Scale: Synaptics Astra SRW1500 Series Single-Chip AI MCU
From the early days of the Internet of Things (IoT), connected devices have been highly effective at sensing and processing real-world inputs. But as AI workloads grow more demanding and real-time responsiveness becomes critical, the value is no longer in collecting data—it’s in acting on it instantly. This shift is pushing AI-native compute out of

“How to Train an AI Model Using Roboflow and Deploy to an MCU with an NPU,” a Presentation from OpenMV
Kwabena Agyeman, Joseph Nelson, President at OpenMV presents “How to Train an AI Model Using Roboflow and Deploy to an MCU with an NPU” at the May 2026 Embedded Vision Summit. Running computer vision on microcontrollers is becoming practical thanks to MCUs that integrate NPUs, enabling low-latency inference with tight… “How to Train an AI
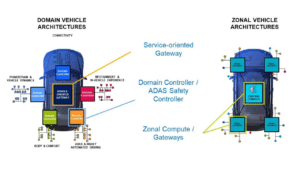
Upcoming Workshop on Data-centric Software-defined Vehicle Systems
On July 9-10, 2026 at 11:00 am PDT (2:00 pm EDT), NXP partner ITTIA will present the online workshop “Building Data-Centric SDV Systems on NXP S32 Automotive Processing Platform.” Workshop sessions will also be hosted for Europe attendees June 29-30, 2026 at 3:00 pm CET, and for Asia attendees July 7-9, 2026 at 9:00 am
Free Webinar On Always-On Edge Perception via Near-memory Compute
Update: This Webinar has been rescheduled for September 22 at the same time. It was originally scheduled for September 24, 2026. On September 22, 2026 at 9 am PT (noon ET), Petronel Bigioi, CEO at FotoNation, will present the free hour webinar “Always-On Edge Perception Via a Heterogeneous Near-Memory AI Architecture,” organized by the Edge