NXP Tech Days Comes to Silicon Valley
NXP Semiconductors will host “NXP Tech Days,” on August 18, 2026, from 9:00 am to 6:00 pm PDT in Santa Clara, California. The event will feature hands-on workshops, expert-led sessions, and real-world insights across embedded systems, edge AI, connectivity, and security. From the event page: The Future, Engineered During the general session, discover how NXP

In-cabin Voice Agent at the Edge: Redefining the Drive
This blog post was originally published at ENERZAi’s website. It is reprinted here with the permission of ENERZAi. Hyundai Motor Group recently introduced Gleo AI — a conversational voice AI agent — in the all-new Grandeur, marking the first time such a system has appeared in one of their production vehicles. Unlike traditional voice recognition, which only responds to fixed

The Eyes of Physical AI: Market Opportunities for MagikEye’s ILT Technology
Feisal Afzal discusses the growing market opportunities for MagikEye’s Invertible Light™ Technology across robotics, smart appliances, automotive systems, and emerging Physical AI platforms. The conversation explores how efficient depth perception can enable safer, smarter, and more capable machines operating at the edge. With increasing demand for spatial intelligence in the physical world, ILT is positioned
Bolom Sound Classification on Cadence Tensilica HiFi 5
Mauricio Greene of Bolom demonstrates real-time Sound Classification running on the Cadence Tensilica HiFi 5 DSP at the Embedded Vision Summit. Bolom Acoustic Intelligence edge models identify hundreds of distinct sound events and soundscape scenes – such as sirens, alarms, horns, traffic and more, fully on-device and without relying on the cloud. The Tensilica HiFi
Pulling Back the Curtain on a Smarter, More Connected AI Future
At the 2026 Embedded Vision Summit, Boston AI CEO Peter Winston explores the latest advances shaping the future of AI. From intelligent agents to next-generation edge applications, he highlights how AI is evolving beyond task automation to become a more capable and collaborative partner within organizations. The video concludes with a look at emerging trends

HTEC White Paper Outlines the Convergence of Edge AI, Semiconductor Software, and Autonomous Systems
This content was originally published at HTEC’s website. It is reprinted here with the permission of HTEC. Physical AI at the Edge: Building the Full Stack for Real-World Deployment For years, AI progress was measured by model benchmark scores. The real test is different: does it work when deployed in a vehicle, a factory, a
Upcoming Workshop on Data-centric Software-defined Vehicle Systems
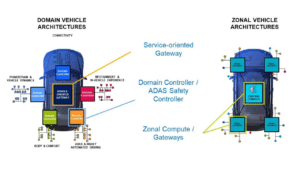
On July 9-10, 2026 at 11:00 am PDT (2:00 pm EDT), NXP partner ITTIA will present the online workshop “Building Data-Centric SDV Systems on NXP S32 Automotive Processing Platform.” Workshop sessions will also be hosted for Europe attendees June 29-30, 2026 at 3:00 pm CET, and for Asia attendees July 7-9, 2026 at 9:00 am

Engineering Intelligence at the Physical Edge
As AI moves into vehicles, appliances and industrial systems, the next challenge is scaling physical intelligence safely, reliably and in real-world conditions This article was originally published at HCLTech’s website. It is reprinted here with the permission of HCL Tech. Key takeaways Physical AI is reaching an inflection point as intelligence moves into real-world systems

Matrix Design Group and Hyundai Material Handling Announce Technology Partnership
NEWBURGH, Ind. — In recognition of National Forklift Safety Day, Matrix Design Group LLC, a wholly owned subsidiary of Alliance Resource Partners, L.P. (NASDAQ: ALRP), and Hyundai Material Handling are highlighting a partnership focused on reducing warehouse collisions caused by blind spots, congested aisles and limited operator reaction time. Through HiVision® powered by OmniPro®, Hyundai
NXP’s Latest Single-Chip Radar Solution Brings On-Sensor L2/L2+ ADAS Processing to Mainstream Vehicle Platforms
What’s New: NXP Semiconductors today announced the SAF8444, a new automotive radar system-on-chip (SoC) featuring an innovative RF design that enables high-performance, power-efficient applications. The solution helps reduce overall system costs by simplifying thermal management for customers and enabling easier vehicle integration. These advantages make it particularly attractive for adoption in electric vehicle (EV) platforms.