Mistral’s 8B Robostral Navigate Steers Robots Using a Single RGB Camera
Mistral AI has introduced Robostral Navigate, an 8-billion-parameter embodied navigation model designed to move robots through unfamiliar environments using natural-language instructions and images from a single RGB camera. Unlike many vision-language navigation systems, it does not require LiDAR, depth sensing or a panoramic multi-camera rig. On the R2R-CE validation-unseen benchmark, Mistral reports a 76.6% success

Real-Time Vision-Language Inference on AMD Radeon™ iGPU Using ROCm™
This demonstration showcases a real-time vision-language inference pipeline running on an AMD Radeon™ integrated GPU, highlighting multimodal AI capabilities on power-efficient embedded platforms. The system processes live or recorded video streams and enables interactive question answering based on visual scene understanding. A lightweight Vision-Language Model (VLM) is deployed to jointly interpret visual inputs and natural

From Silicon to Scale: How DEEPX Is Scaling Developer Support
When your chip is running inside 30 partner ecosystems across 8 countries, how you manage and deliver technical knowledge becomes as critical as the silicon itself. This blog post was originally published at Rapidflare’s website. It is reprinted here with the permission of Rapidflare. DEEPX is one of the most technically credentialed companies in edge AI.

NVIDIA Introduces New Jetson Thor Computers to Advance Mainstream Robotics and Edge AI
New NVIDIA Blackwell-powered T3000 and T2000 modules, paired with new NVIDIA Jetson software memory optimization and agent skills, help partners and customers move advanced robotics, visual AI and edge workloads onto compact, power-efficient systems. This news blog post was originally published at NVIDIA’s website. It is reprinted here with the permission of NVIDIA. General-purpose

In-cabin Voice Agent at the Edge: Redefining the Drive
This blog post was originally published at ENERZAi’s website. It is reprinted here with the permission of ENERZAi. Hyundai Motor Group recently introduced Gleo AI — a conversational voice AI agent — in the all-new Grandeur, marking the first time such a system has appeared in one of their production vehicles. Unlike traditional voice recognition, which only responds to fixed

Smart Sensor Demo: On-Device Object Detection with Lattice CertusPro™-NX
Lattice Semiconductor demonstrates how the CertusPro-NX FPGA bridges an image sensor to a Raspberry Pi, performing on-device pre-processing and object detection before passing data to the host CPU. Sensor frames at 30 fps are fed into the FPGA, where an object detection model — trained on eight automotive object classes — runs locally and outputs

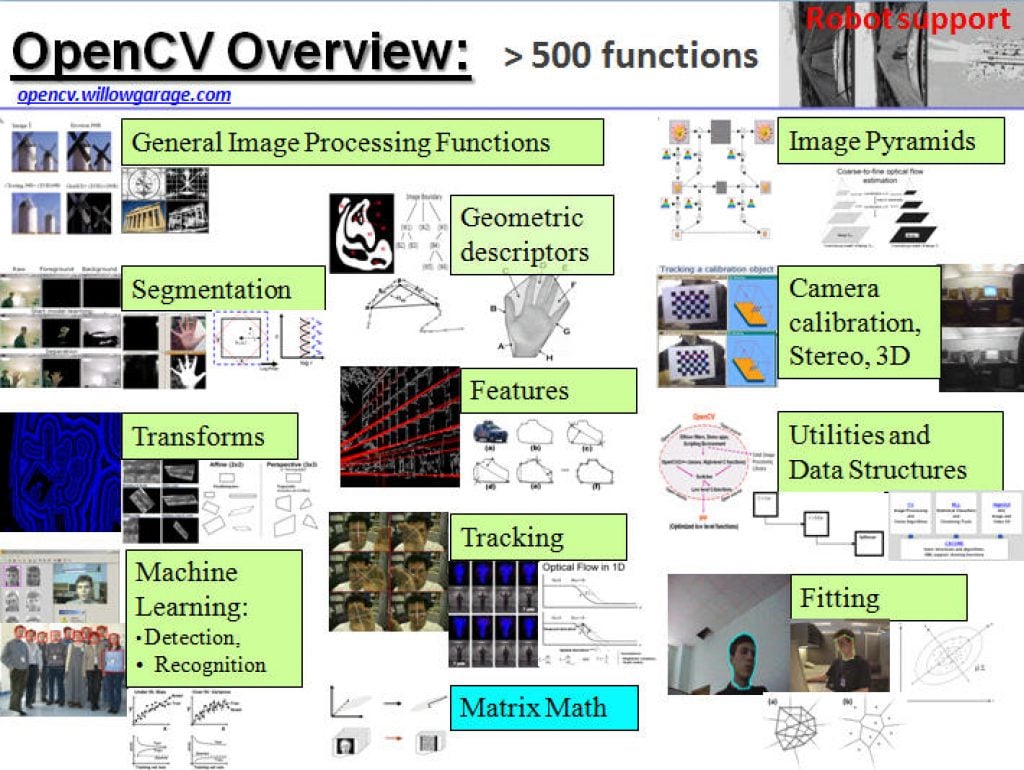
“From YOLO to SAM: Segmentation Models on Real Edge Hardware,” a Presentation from Au-Zone Technologies
Sébastien Taylor, VP of R & D at Au-Zone Technologies presents “From YOLO to SAM: Segmentation Models on Real Edge Hardware” at the May 2026 Embedded Vision Summit. Segmentation is fundamental to edge vision—from drivable surface detection to industrial inspection. But how do different approaches actually perform on resource-constrained hardware?… “From YOLO to SAM: Segmentation
Free Webinar on Designing Computer Vision for the Far Edge
On September 24, 2026 at 9 am PT (noon ET), Nicolas Widynski, AI Fellow at Lattice Semiconductor, will present the free hour webinar “Efficient Computer Vision at the Far Edge: Design and Training Under Constraints,” organized by the Edge AI and Vision Alliance. Here’s the description, from the event registration page: This session explores practical
Beyond TOPS: The First Full-Pipeline AI Vision Benchmark
Beyond TOPS: The First Full-Pipeline AI Vision Benchmark EdgeFirst Perception Index profiles the entire perception pipeline — from CoreML to CUDA, desktop GPU to sub-7-watt edge NPU — and is the first independent benchmark to validate YOLO26 on edge hardware. The Q2 edition includes 330+ full validation sessions of 4 Ultralytics YOLO model families (21
Mark Oliver Demonstrates AI Segmentation Accelerated in Hardware AI Accelerators on the FPGA Fabric
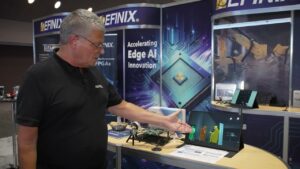
Mark Oliver, the VP of Marketing at Efinix demonstrates how multiple AI models can be compiled to run on dedicated AI accelerators implemented in the high performance Titanium FPGA family. He shows how Efinix supplied tools can be used to optimize an AI model to run on an AI accelerator delivering hardware level performance while

Mark Oliver Demonstrates the Power of Custom Instruction Acceleration for Edge AI
Mark Oliver, the VP of Marketing at Efinix demonstrates the ability to run four independent AI models on the hardened quad core processor inside the Titanium family of FPGAs. He shows how an intuitive software flow can be accelerated through custom instructions to run “bottle neck” software routines in the FPGA fabric at hardware speed

Cadence x MosChip Demo: On-Device SLM Voice Agent on a Vision DSP (Cloud-Free Conversational AI)
This demonstration by MosChip and Cadence shows a Small Language Model (SLM) voice assistant running entirely on-device on the Cadence Tensilica Vision Q7 DSP within an Axera AX650N platform – with no cloud connection. It walks through the full interaction loop: spoken input is converted to text, a compact quantized language model (SLM) generates

Vedya Labs Demonstration of Stable Diffusion Deployment on Cadence Tensilica DSPs
Suresh Pasupuleti, Managing Director of Vedya Labs, presents the company’s work in bringing Stable Diffusion-based image generation to DSP-centric embedded platforms. The demonstration showcases a nearly 500-million-parameter model running on the Axera AX650N SoC, with the text encoder, U-Net, and VAE stages optimized for dual Cadence Tensilica Vision DSPs. Using INT8 quantization and a combination
Bolom Sound Classification on Cadence Tensilica HiFi 5
Mauricio Greene of Bolom demonstrates real-time Sound Classification running on the Cadence Tensilica HiFi 5 DSP at the Embedded Vision Summit. Bolom Acoustic Intelligence edge models identify hundreds of distinct sound events and soundscape scenes – such as sirens, alarms, horns, traffic and more, fully on-device and without relying on the cloud. The Tensilica HiFi

When the Edge Is 400 Kilometers Up: AI, Space, and the Limits of Cloud Computing
This blog post was originally published at Ambarella’s website. It is reprinted here with the permission of Ambarella. The orbital community has reached the same conclusions that the broader edge AI industry has been articulating for years: If moving the data is more expensive than moving the result, the processing belongs where the data was produced. The

HTEC White Paper Outlines the Convergence of Edge AI, Semiconductor Software, and Autonomous Systems
This content was originally published at HTEC’s website. It is reprinted here with the permission of HTEC. Physical AI at the Edge: Building the Full Stack for Real-World Deployment For years, AI progress was measured by model benchmark scores. The real test is different: does it work when deployed in a vehicle, a factory, a